近日,北京航空航天大学yl6809永利官网在《Advanced Science》上发表了题为“Intelligent Rock-Climbing Robot Capable of Multimodal Locomotion and Hybrid Bioinspired Attachment(可实现多模式移动和融合仿生附着的攀岩机器人)”的论文,丁希仑教授为通讯作者,卓百博士后訾佩锦为第一作者,徐坤教授为共同一作。
攀岩机器人是一类攀爬移动机器人,主要在非结构环境(如陡坡和峭壁)中移动和作业,其在星球探测、深海探索、地质考察、野外救援等领域具有广阔应用前景。宇航技术的进步使得人类能够探索更多地外天体(如月球、火星和小行星),服务于我国深空探测重大战略,面向岩质星体探测任务对机器人附着与攀爬技术的需求,围绕仿生攀岩机器人附着技术、机械设计与攀爬稳定控制中存在的问题和挑战,课题组开展了相关研究,研制了多模态自适应攀岩机器人(multimodal and adaptive rock-climbing robot,简称MARCBot)。
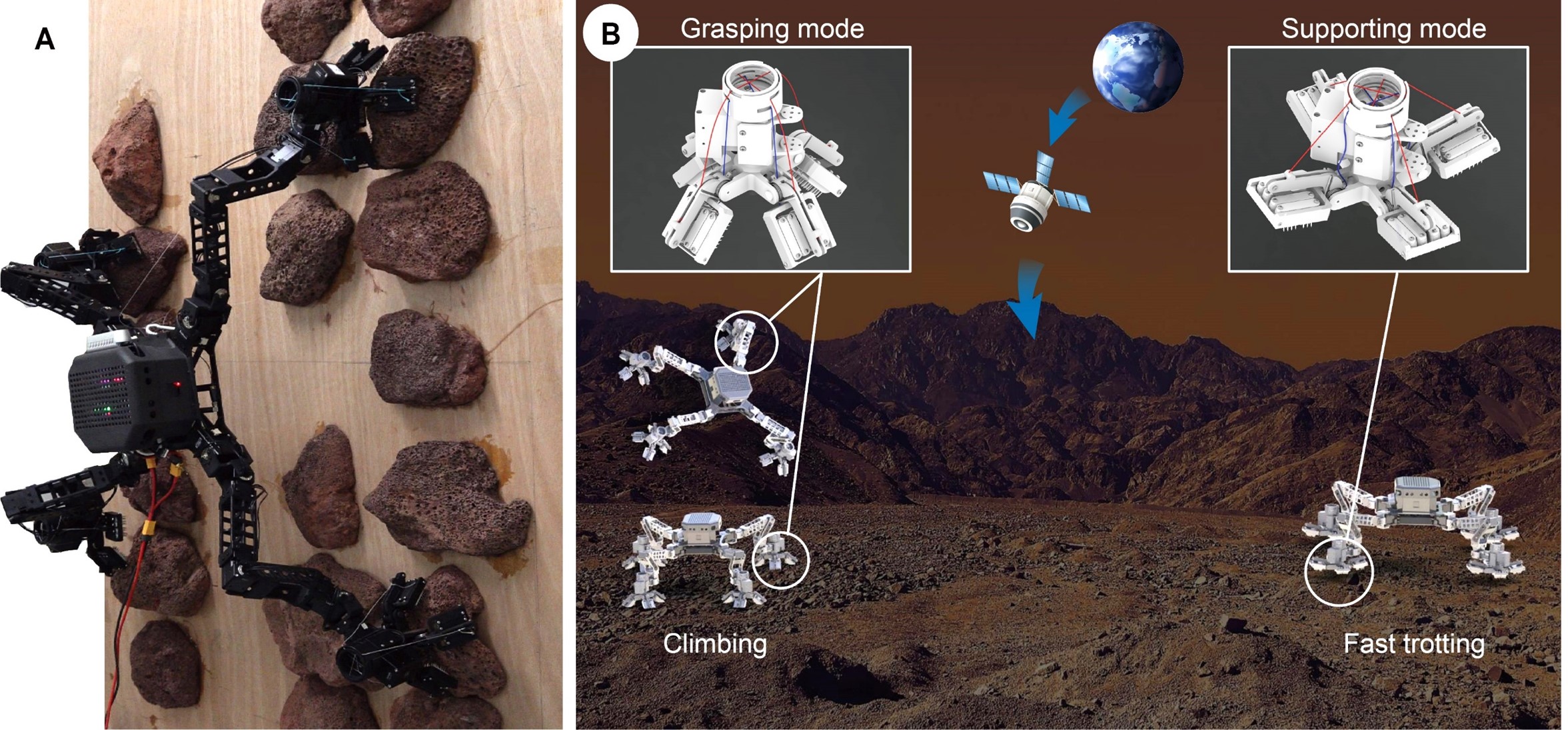
图1 MARCBot攀岩机器人样机与其应用前景
本文的研究内容与创新点如下:
针对当前附着装置对岩石形状适应能力有限、无法同时满足快速行走与攀爬需求等问题,提出基于融合仿生(hybrid bioinspiration)的机器人创新设计方法(融合仿生设计,可以理解其为对不同生物体的运动机制和形态功能的整合,或将不同生物学原理应用于工程设计,以实现更佳的功能和性能),借鉴甲虫跗节链、攀禽爪手、哺乳动物蹄部的形态-结构,设计了具有附着-支撑功能的多模态攀岩爪手。爪手通过主/被动结合的附着方式,仅使用单电机且无需复杂控制便可适应复杂表面形貌。该爪手具有的多模态、快速附着、适应性与附着力强的特点,其自重仅为0.394 kg,在玄武岩完成附着后可产生至少49.05 N的切向附着力和43.71 N的法向附着力,提高了此类攀岩机器人的附着和地形适应能力。
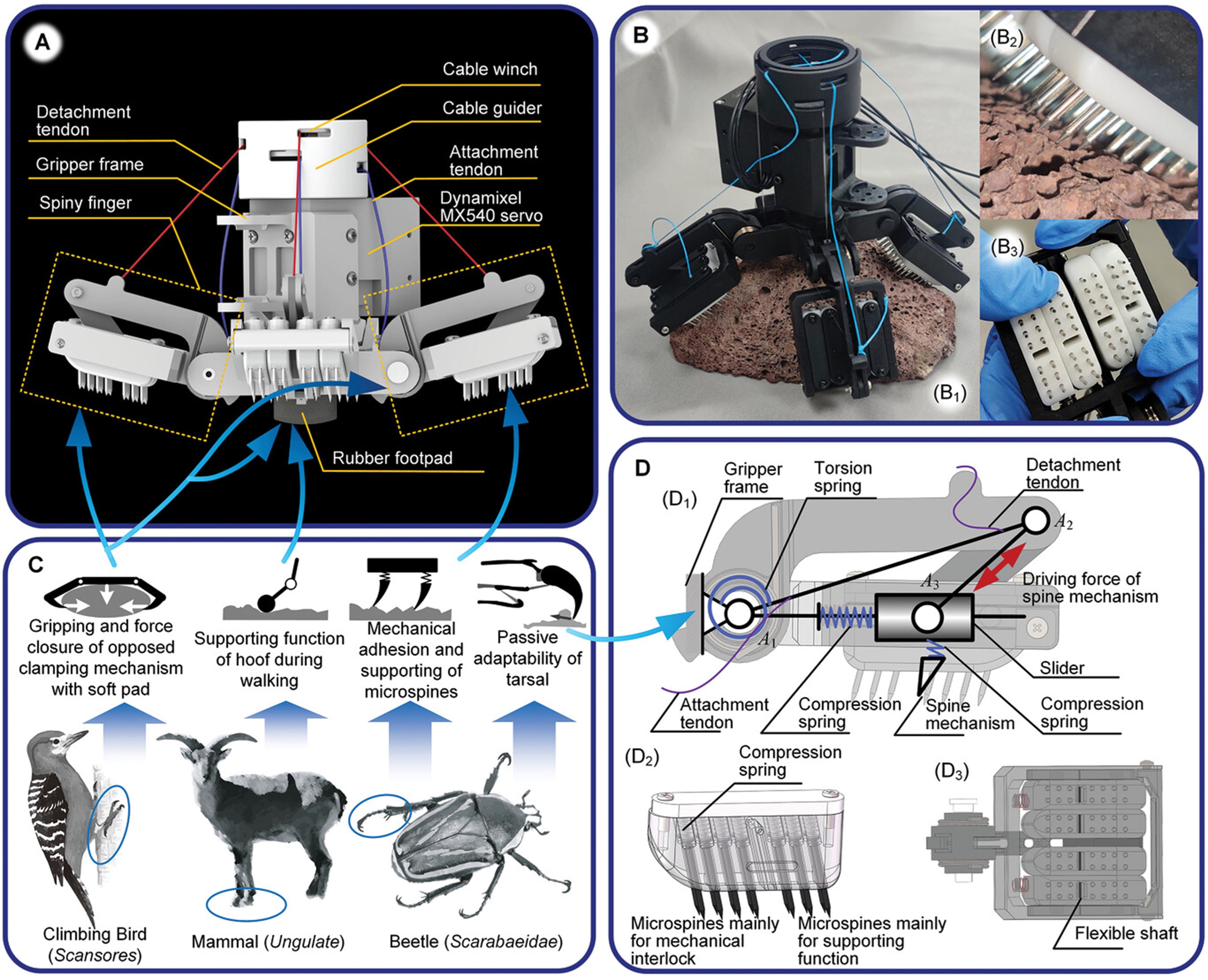
图2 基于融合仿生设计方法的多模态爪刺式攀岩爪手
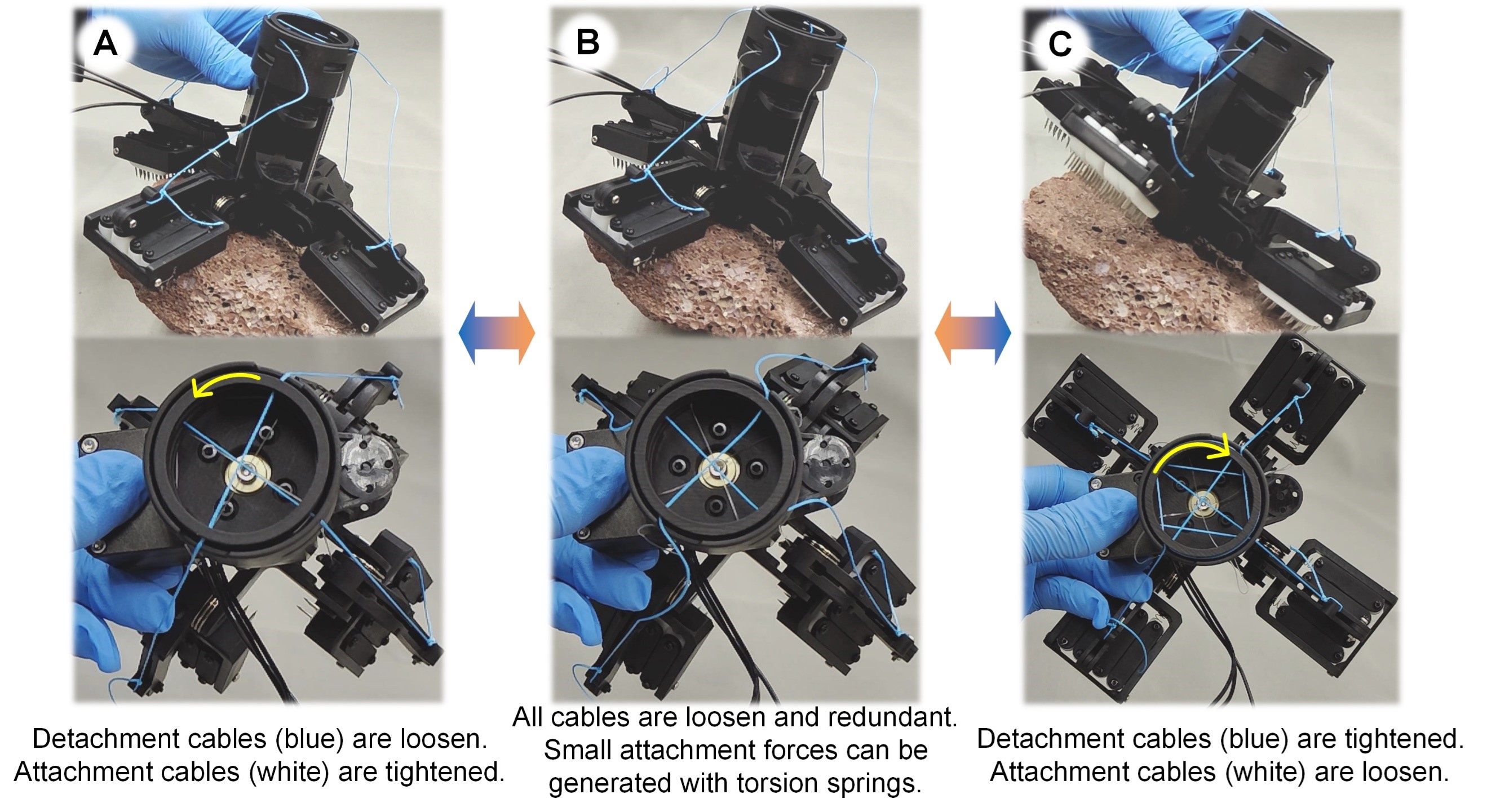
图3 多模态爪刺式攀岩爪手的传动系统和附着/脱附过程
基于附着装置的多模态属性和旋量理论,对仿爬行动物四足构型的进行演变,设计了可实现自由攀爬和多运动模态的攀岩机器人机构构型,其具备类四肢动物攀爬、波动攀爬和类四足动物行走三种运动模态,可针对不同地形与倾角切换模态,提高了机器人的攀附和地形适应能力。
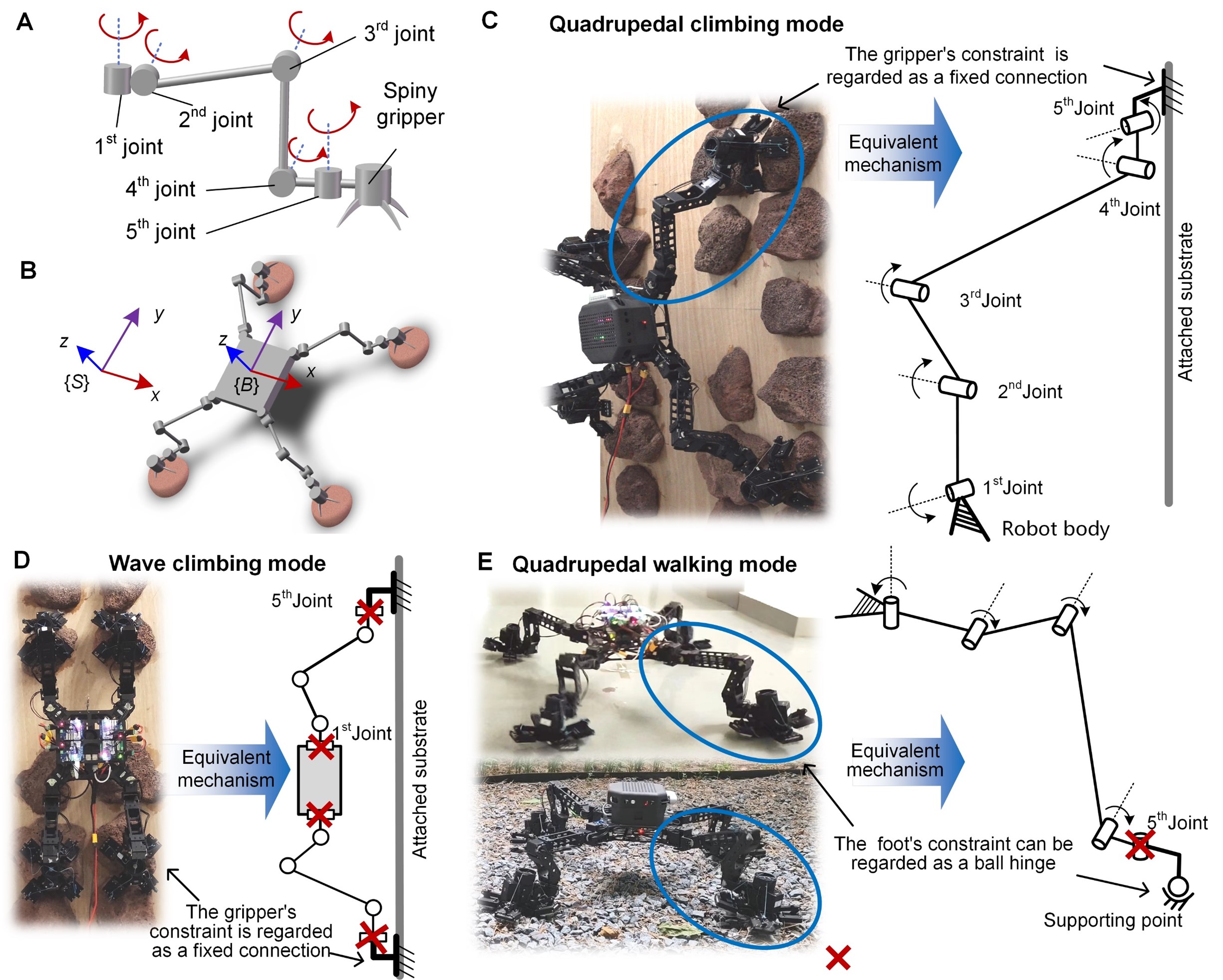
图4 MARCBot的机构设计及多种运动模式
针对攀岩机器人柔顺性不足、附着装置易因过约束导致失稳的问题,基于整体动力学模型,综合考量机器人的稳定裕度与附着力分配方法,提出了一套适用于攀爬机器人的准全身控制方法(quasi-whole-body control, Q-WBC),减小了机器人的内力,避免了单一附着装置承受过大载荷导致的失效,提高了攀附运动的准确性与效率。结合导纳控制实现对高低起伏地形的自适应盲走步态,降低了建模的复杂度和计算成本,为攀爬机器人的最优化调控提供了范式。
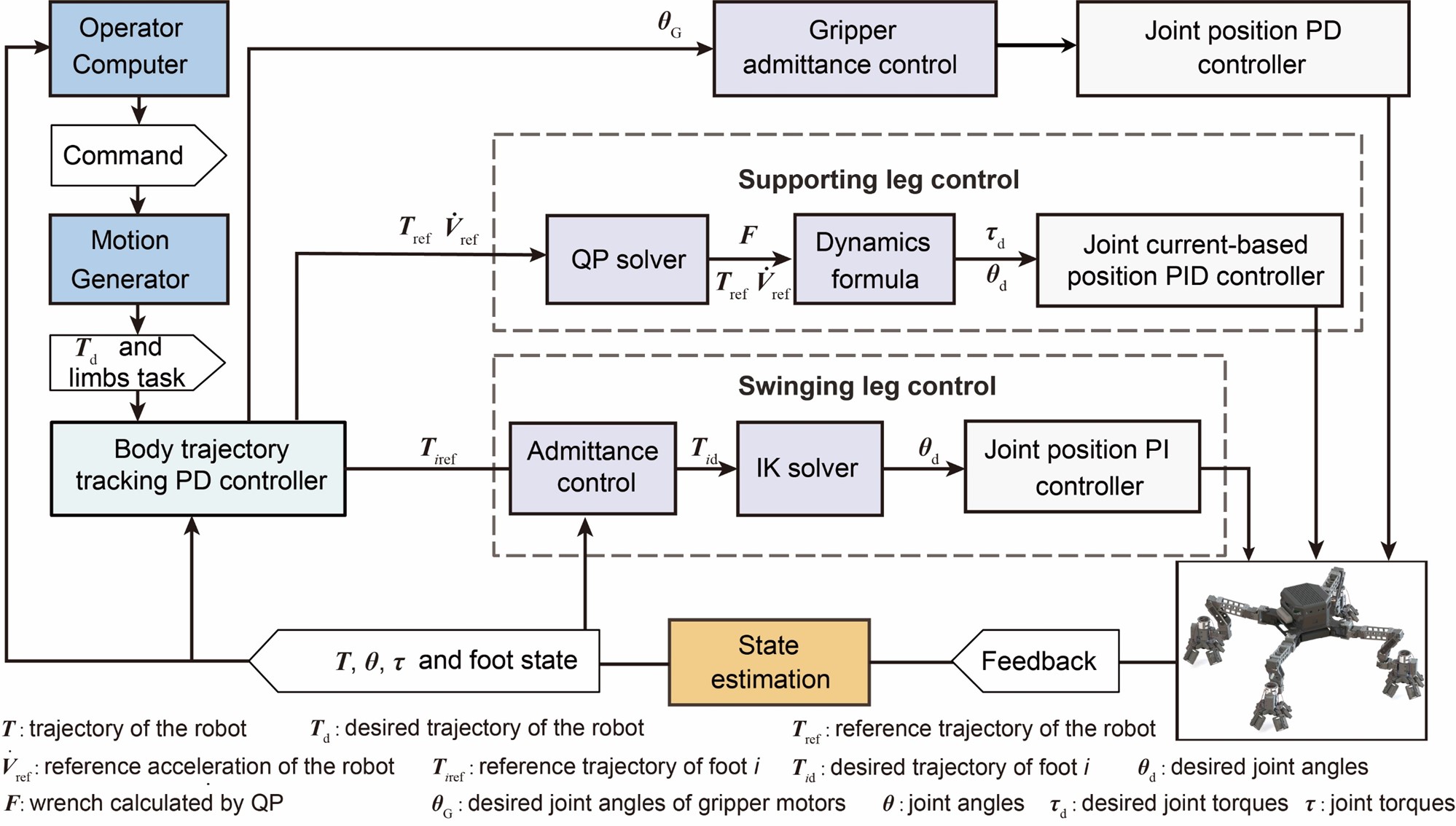
图5 MARCBot的Q-WBC控制方法
实验结果
基于上述研究,研制了攀岩机器人MARCBot,实验结果表明其可利用不同运动模态完成平地快速移动和岩壁稳定攀附。在重力下对MARCBot机器人进行了攀岩和行走测试,其在70°斜面的攀爬速度达到0.22 m/min(归一化速度为1.10 /min),在90°垂直面的攀爬速度达到0.15 m/min(归一化速度0.73 /min)。相较闭环运动学控制和虚拟模型控制,本文提出的控制方法将CoT分别减小了20.03%和6.05%。
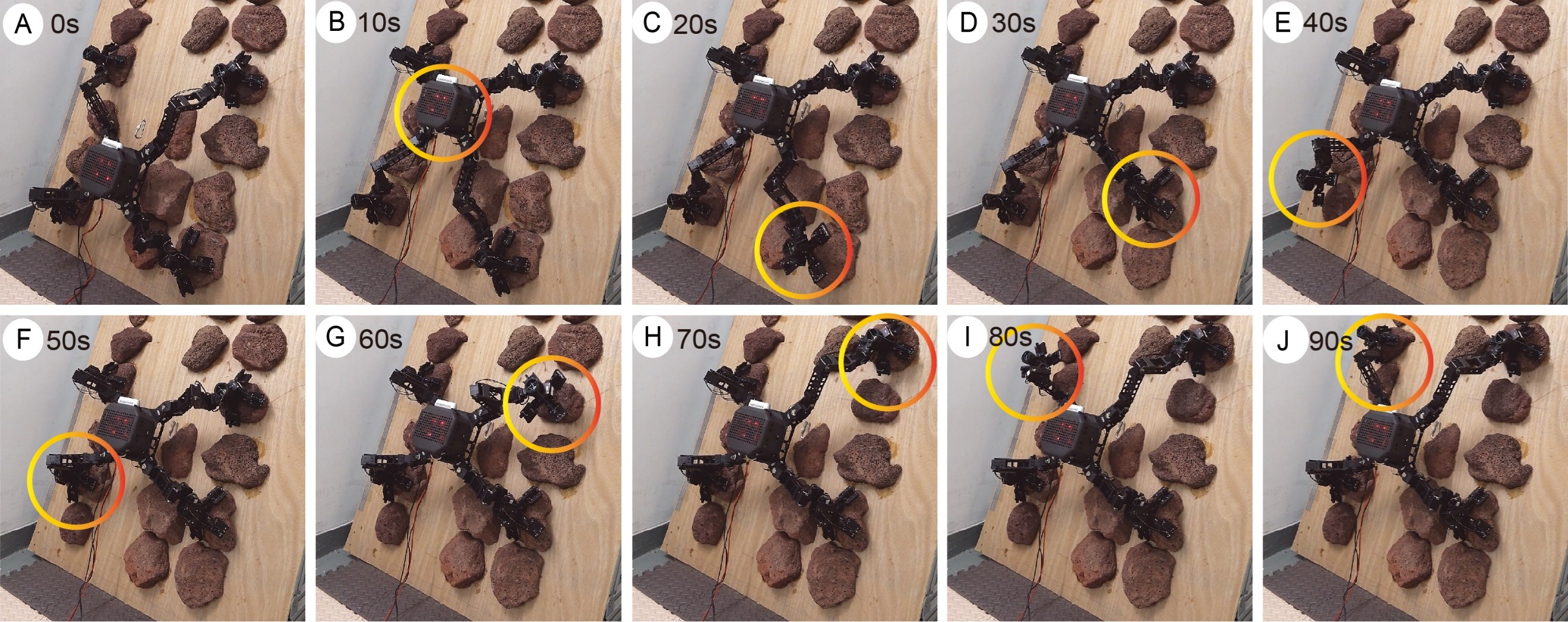
图6 重力下70°斜面攀爬
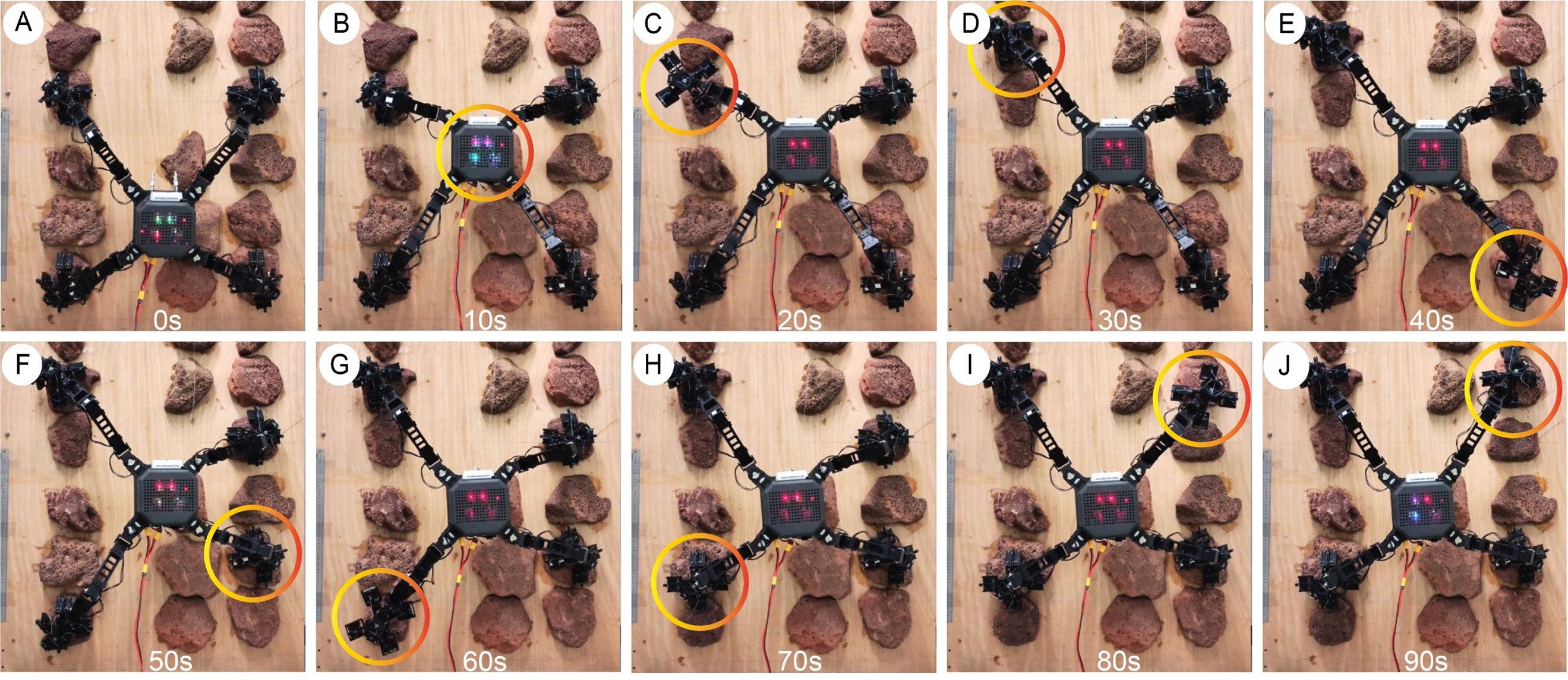
图7 重力下垂直面攀爬
MARCBot还能完成在复杂环境的对角小跑,速度达0.21 m/s,是同类机器人中唯一具备此功能的样机。MARCBot在形貌极端复杂的岩石表面具备的高适应、强附着和稳定攀爬能力,验证了所提出的附着模型、攀附装置与机器人构型的设计方法、攀爬控制方法。与同类机器人相比,MARCBot的地形适应性更好,其运动模式的多样性、攀爬环境重力、攀爬角度、归一化速度处于先进水平,表明MARCBot在星球探测、灾害救援等领域具有应用前景和价值。

图8 MARCBot在多种复杂地形下快速小跑
该研究得到国家自然科学基金创新研究群体项目(No. T2121003)、国家基金面上项目(No. 52375003)、国家重点研发计划(No. 2019YFB1309600)和北航博士生卓越学术基金等项目资助。
论文链接:https://doi.org/10.1002/advs.202309058
